


~ Copyright © 2017-2024 by Seymouria.pl ~



No. Model: 22480
Pics: 480
Relased: 10/2022
Type: R, Technic
Pics: 480
Relased: 10/2022
Type: R, Technic
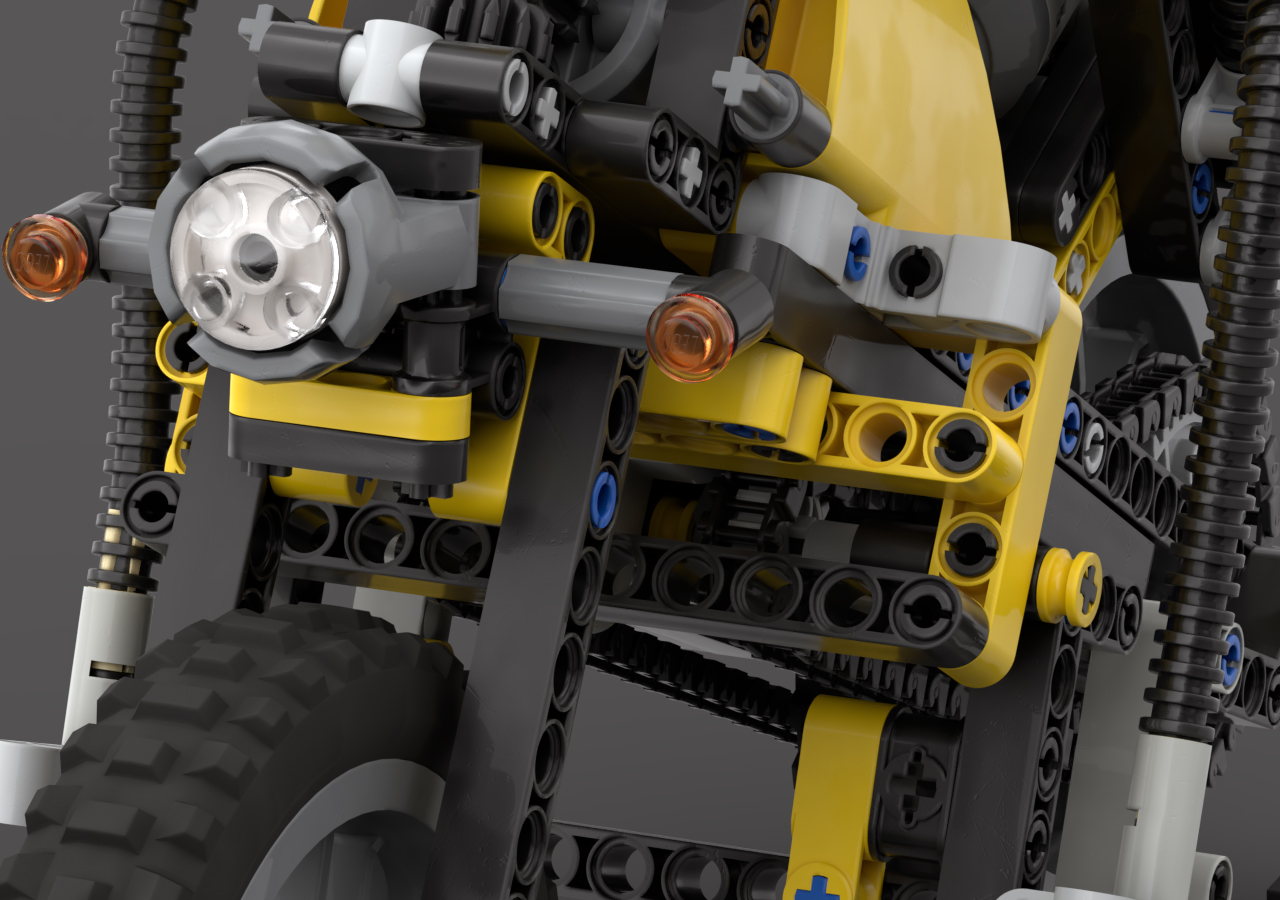
My son gave the idea for the model. The model was supposed to be remotely controlled, playable and it was supposed to be a motorbike. So the choice fell on LEGO® Technic. At the beginning, I thought that the Power Functions elements should be placed on a trailer that would be pulled by a motorcycle. At the same time, the trailer would ensure that the motor will not tip over and it will be possible to steer it. Unfortunately, subsequent attempts and failures with such a solution meant that the idea had to be different. I gave up the trailer. I built a motorcycle passenger from Power Functions elements. They turned into a pretty cool robot. By the way, the center of gravity of the model shifted to the center, between the wheels of the motorbike. To make the model stable and not tip over while driving and turning, I added two small wheels to the sides. The robot is both a passenger and a vehicle drive, and the location of the drive axle itself prompted me to define such a solution as PDS. Phallic Drive System ;)
LEGO® Power Function elements used in this model:
#59510c01 9V Battery Box
#99498c01 Motor 9V Servo
#99499c01 Motor 9V L
#58123c01 Receiver Unit
#64227c01 IR Speed Remote Control
LEGO® Power Function elements used in this model:
#59510c01 9V Battery Box
#99498c01 Motor 9V Servo
#99499c01 Motor 9V L
#58123c01 Receiver Unit
#64227c01 IR Speed Remote Control




















Pin it on Pinterest
Download:

RC
View of the model in 360°
Animated GIF file (51 MB size, wait for loading)
Animated GIF file (51 MB size, wait for loading)
Parts needed to build the model
PDF file
PDF file